Constant Size Point Cloud Clustering (C2NO): Software and Additional Results
About
Point clouds have recently become a popular 3D representation model for many application domains. Often the processing of point clouds with multiple purposes implies structuring and organizing the point clouds into clusters. This is often the case for coding, notably using deep learning-based algorithms like auto-encoders, which process constant size, ideally compact and non-overlapping point cloud clusters, very much like block and macroblock segmentation in standard image and video coding. However, given the unorganized nature of point clouds, selecting the basic data coding entity is not always trivial. The proposed point cloud clustering algorithm is able to produce clusters with a constant number of points, which are also compact and non-overlapping, in the sense that they do not intersect each other, thus effectively offering a point cloud segmentation solution. The characteristics of the proposed algorithm make it unique since there is no single clustering algorithm available in the literature offering the same features, which are increasingly required.
Highlights
- Point Cloud clustering method
- Offers clusters with the same number of points
- Clusters are compact
- Clusters do not overlap
- Acceptable computational complexity
Results
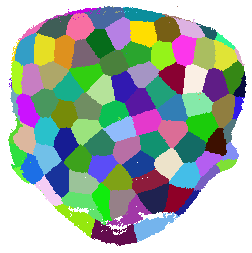
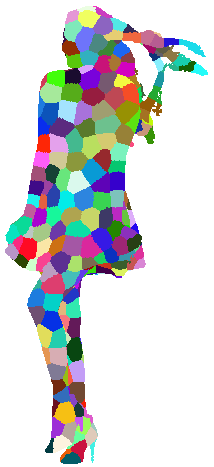
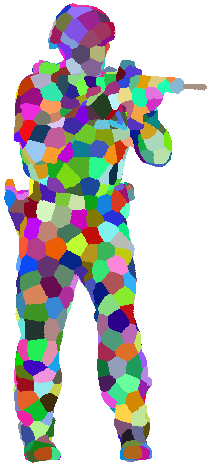
The clusters obtained using this algorithm for two datasets (MPEG Point Cloud Coding and ICME 2018 Grand Challenge on Point Cloud Coding) are available for download.
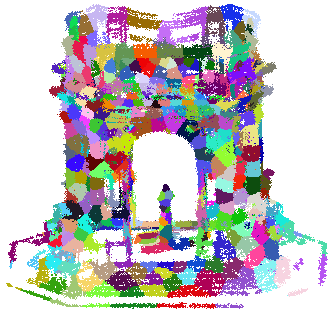
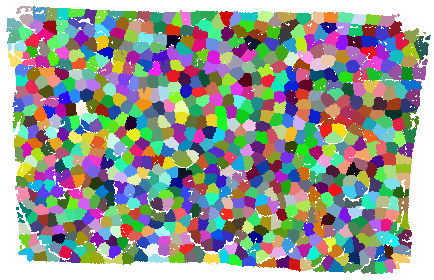
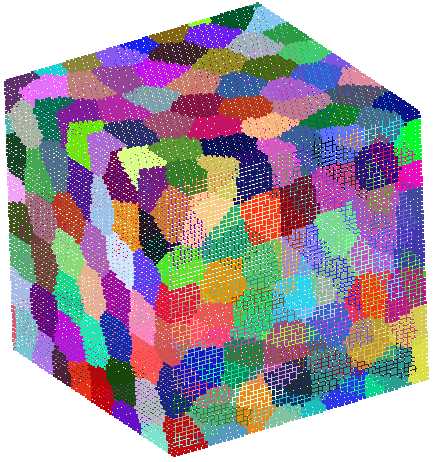
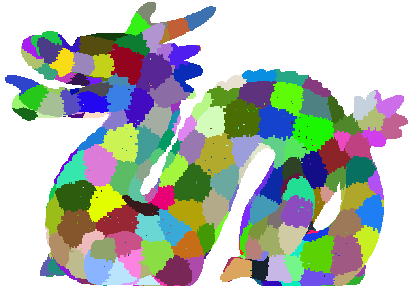
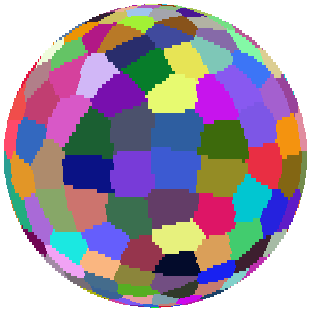
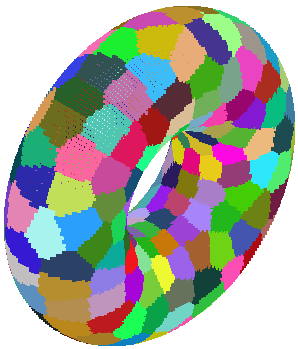
For the first dataset, the target number of points per cluster was set to 2048, while for the second it was set to 128.
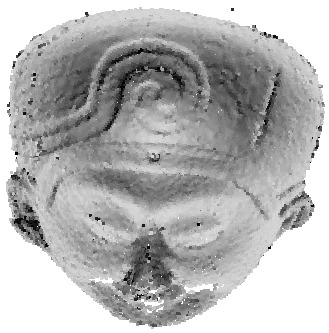
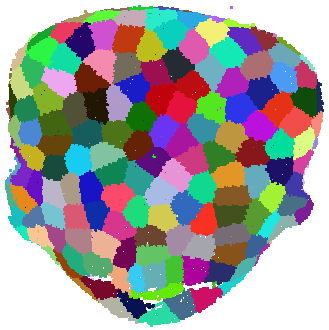
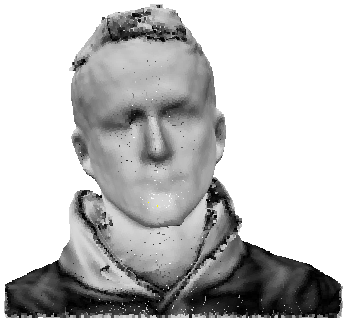
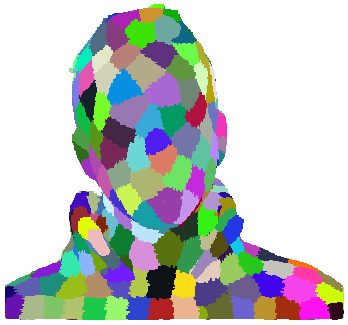
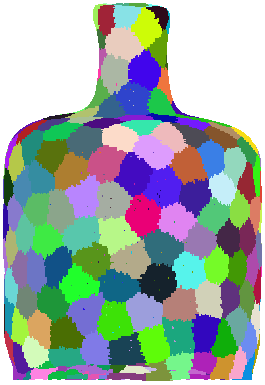
Each cluster corresponds to a separate point cloud file in PLY format, with a random color assigned to all points.
Please contact MPEG to obtain access to the complete MPEG Point Cloud test dataset.
| MPEG dataset |
# Pts |
download all |
| Static Objects |
Egyptian Mask |
272,684 |
download |
| Statue Klimt |
499,660 |
download |
| People |
Loot |
805,285 |
download |
| Longdress |
857,966 |
download |
| Red and Black |
757,691 |
download |
| Soldier |
1,089,091 |
download |
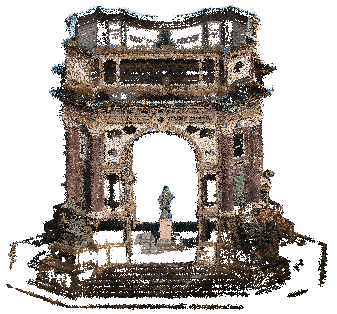
| Buildings |
Arco Valentino |
1,481,746 |
download |
| Facade 00009 |
1,596,085 |
download |
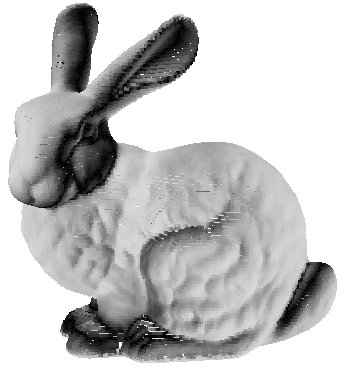
| ICME 2018 dataset |
# Pts |
download all |
Small and Simple
Point Clouds |
Bunny |
35,947 |
download |
| Cube |
30,246 |
download |
| Dragon |
34,926 |
download |
| Egyptian Mask (small) |
34,064 |
download |
| Head |
36,110 |
download |
| Sphere |
30,135 |
download |
| Torus |
31,250 |
download |
| Vase |
35,461 |
download |
Examples
12 / 16
Egyptian Mask (small)
❮
❯
Sofware/Source Code
Available in GitHub: https://github.com/aguarda/c2no
Publications
- A. F. R. Guarda, N. M. M. Rodrigues and F. Pereira, "Constant Size Point Cloud Clustering: A Compact, Non-Overlapping Solution," in IEEE Transactions on Multimedia, vol. 23, pp. 77-91, 2021, doi: 10.1109/TMM.2020.2974325.