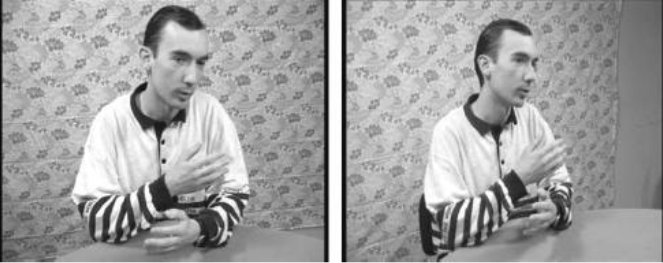
(a) Imagens originais
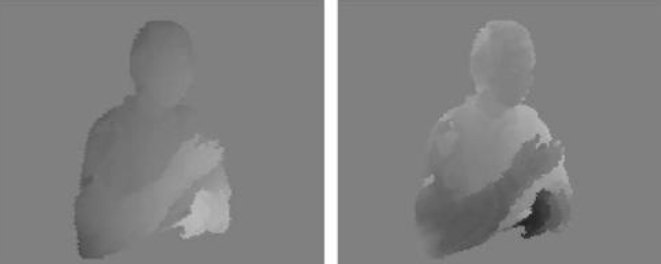
(b) Mapas de disparidade
Fig. 4: Conjunto de imagens estereoscópicas e mapas de disparidade associados. Estes mapas quantificam o desvio dos pixels de uma imagem em relação à outra. Extraído de [3].
A escolha do modelo usado na representação da informação capturada é essencial, visto que essa escolha influencia todos os blocos da arquitectura do sistema MVI, desde o número de câmaras usadas na captura, passando pelos métodos de compressão e transmissão utilizados, ao algoritmo de reconstrução das imagens (vistas de um novo ponto de vista sintético).
As abordagens que se estudam correntemente para efectuar a representação e renderização 3D da cena variam entre dois extremos: o extremo da renderização baseada em modelos geométricos 3D (Model Based Rendering), representado pela computação gráfica (Computer Graphics) clássica, e o extremo da renderização baseada em imagem (Image Based Rendering), que ignora totalmente a geometria da cena baseando-se apenas nas imagens capturadas. Entre estes dois extremos existem várias soluções intermédias (é nesse sentido que caminha a investigação hoje em dia), que combinam as vantagens de ambos. Um exemplo são os sistemas que usam uma representação baseada em imagem combinada com um mapa de profundidade ou disparidade (Figura 4), que quantifica, para cada pixel das imagens capturadas, qual a profundidade a que se encontra o objecto projectado no pixel. Com estes mapas cria-se uma representação algo semelhante a uma representação tridimensional, denominada por vezes 2.5-D.
|
|
|
(a) Imagens originais |
|
|
|
(b) Mapas de disparidade |
|
Fig. 4: Conjunto de imagens estereoscópicas e mapas de disparidade associados. Estes mapas quantificam o desvio dos pixels de uma imagem em relação à outra. Extraído de [3]. |
Descrevem-se seguidamente os dois paradigmas-extremo da representação 3D com mais detalhe.
|
|