




Captação de 3D
Existem diversas maneiras de produzir conteúdo 3D, porém todas se baseiam numa combinação de três ou quatro técnicas básicas, fazendo com que os requisitos específicos sejam dependentes da situação de produção, real time (directo) ou off-line (posterior à captação do conteúdo). Nos tempos que correm, tendo em conta a utilização nos eventos em directo, filmar em Stereo é a forma mais praticável de captação de conteudo em 3D. Este método consiste na utilização de duas câmeras idênticas de forma a capturar a vista direita e esquerda da cena. Idealmente a distância entre o centro das lentes deve ser a mesma entre os olhos de um adulto, cerca de 6,5 cms. No entanto em sistemas de câmeras com grandes lentes é impraticável este método, pois as plataformas desenhadas para este método contêm espelhos que permitem duas câmeras serem montadas com um ângulo de 90 graus.
Uma alternativa é aceitar uma maior distância entre as câmeras e compensar de alguma forma esta distância com interpolação espacial para electronicamente reduzir a distância entre os centros das lentes. Um número de combinações de câmeras e equipamentos foram desenvolvidos e têm abordado com sucesso alguns dos desafios técnicos que resultam da captação em directo de 3D. Para obter um óptimo par Stereo de imagens, ambas as câmeras precisam estar sincronizadas e alinhadas: horizontalmente, no plano vertical (tilt), no foco, etc, e as câmeras devem convergir suavemente de uma posição paralela perfeita (para objectos no infinito) a um ângulo relativamente acentuado (para objectos perto). Uma variante da captura de imagem com duas câmeras em que cada uma entrega uma imagem 2D, é ter uma câmera que dá uma imagem 2D e um mapa de profundidade (usando como base a medição da luz infravermelha reflectida que é emitida pela própria camera), de modo que a saída não é Stereo (esquerda e direita), mas em 2D-plus-Depth (ou melhor, 2D-plus-z).

No entanto, há ainda sérias limitações nesta abordagem. "Stereo é mais adequado como um formato de aquisição pois as câmeras de imagem+profundidade, muitas vezes têm um alcance e qualidade limitados enquanto que as câmeras Stereo podem acompanhar a evolução normal da tecnologia 2D. Além disso, a 2D-plus-Depth não suporta a visualização de efeitos de direcção dependentes da iluminação, como luzes ou transparência, embora esses efeitos raramente são destaque no vídeo". Um conceito conceptual (e operacionalmente) mais simples, é ter uma câmera com uma lente integrada e dois sensores para as imagens, de forma a captar a imagem à esquerda e à direita.
Conversão para 3D manual
A história de conversão do preto e branco para a cor, faz sentido para entender como existem muitas semelhanças com a conversão de 2D para 3D. Aqui também há um nicho da indústria de produção pós-emergentes para a conversão manual de 2D para 3D, mas dadas as muitas horas e canais para preencher e com o conhecimento sobre os altos custos para a conversão manual, há uma busca para o cálice de ouro em 3D: conversão automática de 2D para 3D, contudo, a conversão manual manteve-se dominante nos últimos anos. Dado que o foco deste artigo é em televisão 3D e sendo que este tipo de conversão não é muito apropriado para eventos em tempo real, não será explicado em detalhe a conversão manual.
Conversão para 3D automática
As técnicas de conversão para gerar informações de profundidade descritos até agora são, basicamente, off-line, não em tempo real. Nem sempre há tempo para fazer isso e para eventos ao vivo o tempo entre a captação e distribuição é no máximo algumas frames, e não três meses. Neste domínio existe evolução em dois campos: conversão em tempo real do Stereo para 2D-plus-Depth, e conversão em tempo real de 2D para 3D (seja Stereo ou baseado em profundidade).
Conversão de Stereo para 2D-plus-Depth é algo que faz sentido. Aquisição em tempo real é a única abordagem viável agora para os eventos ao vivo, mas a profundidade tem as vantagens mencionadas para o dispositivo de visualização, a elegância de interoperabilidade e oferece uma visualização sem óculos 3D. Os primeiros conversores em tempo real de Stereo para profundidade foram demonstrados (por exemplo Philips na SID 2006). Sem entrar em detalhes, o trabalho para atingir este objectivo relaciona-se muito com a codificação MPEG, olhando para as diferenças dinâmicas entre as funções motion-estimator das imagens direita e esquerda, e a partir da sua disparidade construir o mapa de profundidade.
O objectivo do trabalho sobre a conversão totalmente automatizada de 2D para 3D é bastante simples: converter todo o conteúdo disponível para a televisão em 2D (séries, desporto, notícias, propagandas, documentários, DVDs, gravações próprias) em tempo real, a custo zero em 3D para visualização na 3DTV em casa. Por simplificação, esta conversão toma lugar dentro de uma 3DTV ou, por algum aparelho dedicado que faz a conversão e que está ligado directamente a uma 3DTV. Algumas empresas demonstraram várias versões destas conversões (DDD, Philips e outros) e as 3DTV estão no mercado com esta tecnologia de conversão. No entanto não está claro o que é exactamente implementado e se a tecnologia é proprietária ou registada por outros intervenientes neste domínio.
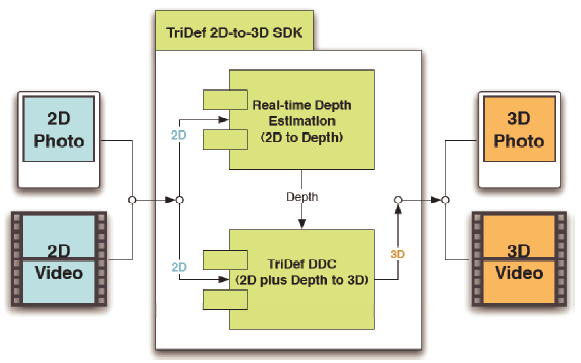
A partir do que é publicado sobre este assunto ou demonstrado em exposições, parece provável que a maioria das soluções irão de alguma forma seguir a ideia do mapa de profundidade. Uma sucessão de frames é analisado no domínio do tempo no nível dos macro-blocos, como é o caso de codificação MPEG, e os resultados de um modelo motion-estimator é usado para gerar um mapa de profundidade rudimentar, o que também é usado para gerar a segunda vista (ou várias vistas no caso de ecrãs multi-view). A verdade no entanto, é que o estado actual desta conversão não é suficiente para oferecer uma solução para a geração rápida e massiva de conteúdo 3D a partir de arquivos existentes ou produções ao vivo.
Ferramentas de produção 3D
As ferramentas actuais de produção ao vivo são baseadas em Stereo e geralmente utilizam equipamentos 2D combinados, como câmeras broadcast HD posicionadas em plataformas especialmente desenhadas para a captação de 3D. O alinhamento entre as duas visões da câmera é crucial para evitar más experiências em 3D e certamente, para as produções ao vivo este é um desafio, pois em tempo real não existe muito tempo para a calibração e correcção de pequenas falhas mecânicas.
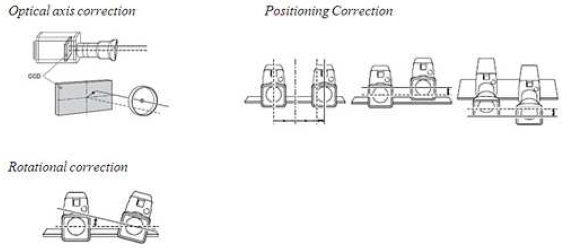
No Mundial 2010, testemunhou-se a primeira implementação extensiva de uma ferramenta que a Sony tem desenvolvido, que dá pelo nome de Box18 Processor 3D. Em essência, o processador 3D Box pode detectar, analisar, exibir e permitir a correcção no domínio da electrónica dos erros de alinhamento diferentes que podem ocorrer, tais como o desalinhamento da posição vertical e horizontal, efeito de keystone, zoom e muito mais.
Legendas e gráficos
Pessoas que vivem nas partes do mundo onde as legendas são comuns no cinema, testemunharam um desenvolvimento na utilização de legendas. Tome-se como exemplo o filme Beowulf e Avatar. Beowulf tinha legendas em profundidade fixa, independente da profundidade das cenas individuais, e "comutação para a frente e para trás" entre a profundidade certa das legendas e a profundidade das cenas, requer alguma acomodação do olho podendo mesmo assim apresentar algum esforço. Em 2008, a Philips demonstrou uma ferramenta em que "a colocação de profundidade" das legendas estava ligada aos mapas de profundidade das cenas diferentes, o que resultou numa experiência de visualização mais confortável.
Uma abordagem semelhante foi seguida por Technicolor para a legendagem do Avatar e dos filmes posteriores, descrito como "... um método para criar um mapa de profundidade da imagem do olho esquerdo como a do olho direito, que permitam uma determinação automática para a colocação de gráficos no ecrã, como legendas e gráficos interactivos (menus) ... que se baseia em pesquisas para determinar a percepção humana de legendas como parte de uma experiência de cinema em 3D. "
Trabalho realizado por Eduardo Bettencourt, Hugo Mineiro e Fábio Constantino
no âmbito da cadeira Comunicação de Áudio e Vídeo do curso de MERC
IST 2011 ©
IST 2011 ©
