A perceção tridimensional de objetos é uma característica intrínseca ao sistema visual não só do ser humano mas também da maior parte dos animais. É através da estereoscopia, inerente ao facto do ser humano possuir visão binocular, que é possível captar a sensação de profundidade recorrendo à interpretação, pelo cérebro, das duas imagens que cada olho capta.
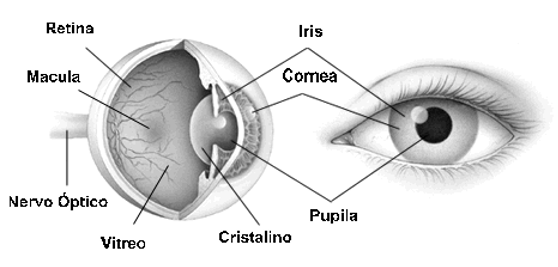 Figura 1 - Anatomia de um olho [21].
Figura 1 - Anatomia de um olho [21].
A estereoscopia depende essencialmente da capacidade do olho de focar um objeto à medida que a sua distância varia (acomodação), bem como de sincronizar ambos os olhos, através da sua rotação, para que foquem o mesmo objeto (convergência). O sistema visual humano utiliza estas duas capacidades automaticamente sendo este processo conhecido por reflexo de acomodação-convergência [2]. Para além disso, é graças à disparidade presente na retina que o cérebro adquire informação em relação à profundidade. A disparidade da retina permite ao cérebro obter informação sensorial relativa à diferença entre as duas imagens observadas por cada olho e, como cada olho observa o mesmo objeto com distância e ângulos diferentes, possibilita obter a noção de profundidade do objeto observado. Existem dois tipos de disparidade que variam com a localização à frente (disparidade negativa) ou atrás (disparidade positiva) do ecrã, como se pode observar na Figura 1.
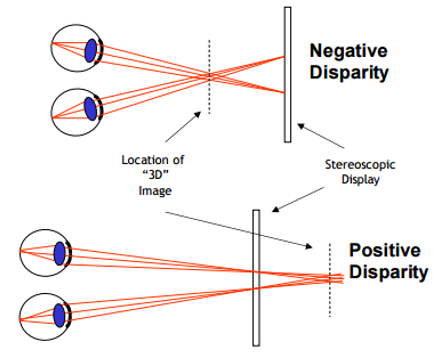 Figura 2 - Disparidade positiva e negativa [2].
Figura 2 - Disparidade positiva e negativa [2].